不整地移動ロボット

オフィスや工場では,ロボットは全方向(どの方向にも姿勢を変えることなく移動できること)
に移動することが出来ると小回りが効き,素早く物を運んだり,仕事を効率良く進めることが出来ます.
しかし,従来の全方向移動ロボットは,オフィスにあるようなちょっとした段差も越えて
進むことが出来ませんでした.
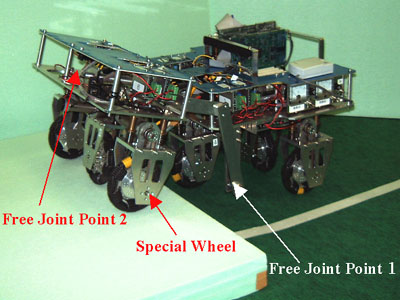
そこでこの研究では,新しく7輪の全方向車輪(オムニホイール)を持ち,段差にあたると変形する
車体(パッシブリンク機構)を組み合わせた移動ロボットを開発して,以下の問題に取り組みました.
- パッシブリンク機構の開発:車体が変形する機構をどのように設計したら,最も安定して滑らかに動作するか?
- 車輪制御方法の開発:車体が変形したら,車輪の回転すべき量が変わります.それをリアルタイムでどのように求めるか?
- スリップの抑制手法:車輪のスリップをどうやったら減らすことが出来るか?